I
Iчить только горизонтальное перемещение одного из изображений и совместить две разделенные части изображения в одно целое изображение.
Таков принцип устройства двухклинового вращающегося компенсатора, два клина которого одинаковы и поворачиваются на равные углы, но в противоположных направлениях.
Обозначим величину перемещения АВг' изображения через /; тогда имеем окончательную формулу для перемещения изображения
I
При вращении клиньев компенсатора изображение может перемещаться в обе стороны от центра поля зрения, отточки А. Крайние его удаления от центра будут на 2/ (п— 1)<хв каждую сторону (при ® = 0° и ® = 180°), а полная величина перемещения 4f (п—1)а. Для того чтобы иметь возможность использовать значительную часть полного перемещения изображения, компенсатор ставится в некоторое исходное положение <р0, причем полученное при таком положении компенсатора перемещение приводится к нулю иными средствами.
Это крайнее положение «0 компенсатора обычно берется около 30°, так как при меньших углах ( и углах больших 150°) величина I начинает изменяться в зависимости от угла ® очень медленно, что представляется неудобным для работы дальномера. Полный рабочий диапазон клиньев, таким образом, равен
 ►
►т. е. составляет около 85% всего действия компенсатора. Мы имеем начальное перемещение изображения, равное 2а cos®0 (начальное положение клиньев). При некотором угле <р поворота клиньев перемещение равно 2а cos ®. В итоге при переходе от угла <р0 к углу ® изображение передвинется на разность этих перемещений, т. е.
Допустим, что мы настолько повернули клинья, что обе половинки изображения совместились в одно целое изображение; тогда, очевидно, величины /, стоящие в левых частях формул (6,1), и (7,6), равны друг другу, и мы будем иметь следующую зависимость между углом ® поворота клиньев и измеряемой дистанцией D
откуда
или, приняв во внимание, что а = /8, будем иметь

По этой формуле по заданному преломляющему углу 8 клиньев и базе дальномера В можно градуировать углы <р вращения компенсатора сразу в делениях дистанций.
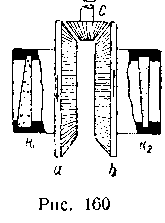
Совместное взаимнопротивоположное вращение клиньев и производится при помощи конических шестерен а и b на оправах клиньев (рис. 160), одновременно приводимых в движение конической шестерней с; последняя получает движение от. дистанционного валика, выходящего наружу дальномера. Этот валик одновременно приводит в движение и дистанционный барабан с нанесенной на его цилиндрической поверхности дистанционной шкалой. В монокулярных дальномерах дистанционная шкала часто бывает нанесена на стеклянном диске, твердо связанном с одним из клиньев компенсатора. Вращение клина приводит